새로운 배움 — Lock-In Amplifier
100년에 가까운 역사를 가진 전자 측정 장비 기술
최근에 전자 측정 장비관련 회사에 면접을 보게되었다. 이 회사의 시그니쳐 제품 중 하나가 Lock-In Amplifier라는 장비다. 파동 형태를 가진 아날로그 신호를 측정하기위해 1930년대 쯤 태어난 기술이며 약 100여년의 역사를 가지고 있다. 과연 이 기술은 무엇일까? 면접에 준비하기위해 공부해 보았다.
Lock-In Amplifier
기술의 발전과정과 범용성
1930년에 개발되어 20세기 중반에 상용화된 전자 측정 장비로써, 신호의 크기(amplifier)와 위상(phase)을 측정할 수 있다. 신호의 순수함을 오염시키는 노이즈(noise)가 심한 주변 환경에서도 정확한 측정이 가능한 놀라운 기술이다. Homodyne 감지 및 Low-Pass 필터링 등을 통해 신호의 크기와 위상을 특정 주기(period)를 대상으로 상대적 측정을 할 수 있게 해준다. Lock-in 측정 방식은 신호를 대상 주파수를 중심으로한 밴드(band)의 범위내에서 측정할 수 있게 해주어, 그 외의 범위에 있는 모든 주파수 부분들을 제거해준다. 오늘날 최신 기술은 120 dB의 동적 리저브(dynamic reserve)를 지원하여, 노이즈가 존재하는 환경에서도 측정할 신호의 크기를 수백만 배 더 정확하게 측정할 수 있게 해준다.
수십년간 관련 기술이 발전하면서 연구자들은 Lock-In Amplifier의 다양한 사용처를 찾게 되었다. 오늘날 가장 널리 활용되는 분야는 AC 전압 및 AC 위상 미터기, 노이즈 측정 장비, 임피던스(impedance) Spectroscope, 네트워크 분석기, 스펙트럼 분석시 및 phase-locked loop에서 위상 감지기 등이 있다. 활용 분야는 점점 커져서 햇빛아래서 코로나를 관측하거나, 퀀텀 홀 효과(Quantum Hall effect) 측정, 분자내 원자의 본딩(bonding) 성질을 직접 이미징하는데 활용되기도 한다. 그만큼 Lock-In Amplifier는 범용성이 매우 뛰어나며, 오늘날 거의 모든 실험실에 사용되는 스펙트럼 분석기 및 Oscilloscope 만큼이나 공학, 물리, 생명과학 분야에서 연구 수행을 위해 필수적인 도구가 되었다. 우수한 도구들이 그렇듯, 사용자로하여금 주요 작동 방법이나 기능만 학습해도 도구를 충분히 가치있게 활용하고 수행하려는 실험을 성공적으로 설계할 수 있게 해준다.
기술의 목적과 강점
Lock-in Amplifier는 기본적으로 Lock-in 감지 기법을 활용하는데, 이는 시간과 주파수 범위에서 모두 표현된다. 신호 정보를 얻는 시간을 최소화하면서 신호 대비 노이즈 비율(SNR, Signal to Noise Ratio)를 최적화시키는 것이 이 기술의 관건이라할 수 있다. 즉, 신호를 최대한 빠르게 수집하면서, Noise를 최소화 시키려는 목적이라 볼 수 있다.
아래 그림은 노이즈에 완전히 잠긴 입력 신호를 보여주는데, Lock-in Amplifier는 이러한 조건에서도 참조하는 신호의 위상을 기준으로하여 입력 신호의 위상을 측정하고 입력 신호의 진폭까지 측정할 수 있다.

기술의 원리
Lock-in Amplifer는 노이즈가 많은 환경에서 신호의 시간 의존성 정보를 활용해 신호 정보를 추출하는 원리를 활용한다. Lock-in Amplifier는 복조(Demodulation) 혹은 위상민감감지(phase-sensitive detection)라는 기법을 적용하는데, 이는 참조 신호와 입력 신호를 곱하기(multiplication)하여, Down-mixing 혹은 Heterodyne/Homodyne 감지 기술을 활용해 결과물에 적절한 Low-pass Filter를 적용하는 기법이다. 이렇게 함으로써 원하는 주파수에 존재하는 신호 정보를 다른 주파수대의 정보들과 분리시킨다. 참조 신호는 Lock-in Amplifier를 통해서 생성되거나 외부 소스나 실험에 의해 Lock-in Amplifier에 입력되는 방식이다.
참조 신호는 보통 Sine 파형이지만 다른 형태를 가질 수도 있다. 순수한 Sine 파형을 활용한 복조는 기본적인 주파수 및 이를 포함한 모든 고조파(harmonics)에서 선택적인 측정을 가능하게한다. 반면, 일부 도구들은 사각 파형(sqaure ware)를 사용하여 신호의 모든 고조파를 추출하기 때문에 잠재적으로 측정에 있어 시스템적 에러를 발생시킬 수 있는 문제가 있다.
Lock-In 감지 기술을 이해하기 위해서는 시간과 주파수 두 도메인에서 mixing과 필터링 과정을 이해해야한다.
Dual-Phase 복조(이중 위상 복조)
아래 a)는 전형적인 Lock-In 측정 기법의 구조를 보여준다. 여기서 Sine 파형 신호는 DUT(Device under Test, 현재 실험중인 대상 장비)를 움직이며 이는 참조 신호(reference signal)의 역할을 한다. DUT의 응답은 Lock-In에 의해 분석되며, 이는 참조 신호를 기반으로 진폭 및 위상을 가진 출력 신호를 내보낸다.
b)는 Lock-In Amplification 과정을 보여주는데, 입력 신호가 참조 신호와 곱해(multiplication)지게되고, 위상은 참조 신호의 위상에서 90도 phase-shift된 값을 갖는다. Mixer의 출력은 Low-Pass Filter를 통해 필터링되어 노이즈 및 2W(2ㅠf) 부분을 제거하고, Polar 좌표(coordinates)로 변한된다.

Dual-Phase 복조 과정 설명
일반적인 실험에서는 a)에서 표현된 것처럼 DUT가 Sine 파형 신호에의해 시뮬레이션된다.
1. 디바이스의 응답 신호인 Vs(t) 및 참조 신호인 Vr(t)는 Lock-in Amplifier에 의해 진폭(R)과 위상(Θ)을 결정하는데 활용된다.
2. 이는 b)에서 볼 수 있는 것처럼 Dual-Phase 복조 회로에 의해 이루어진다.
3. 입력 신호는 분리되고 각각 본래 참조 신호와 참조 신호에서 90도 Phase-Shift된 신호와도 곱해진다.
4. Mixer를 통해 곱해진 신호들은 Low-pass Filter를 거쳐 X와 Y의 두 가지 출력 신호로 나온다.
5. 진폭(R)과 위상(Θ)이 X와 Y 출력 신호에서 추출되고 Cartesian 좌표에서 Polar 좌표로 변환된다.

주의할 점은 모든 사분면(quadrant)를 커버하는 출력 범위를 갖기 위해서는([-ㅠ, ㅠ] 범위) atan이 아닌 atan2가 사용된다는 것이다. b)는 Lock-in Amplifier가 두 가지 다른 위상으로 복조하기 위해 입력 신호를 분리하는 것을 보여준다. 일반적인 아날로그 도구와는 대조적으로, 디지털 도구는 신호를 분리할 때 발생할 수 있는 SNR의 손실과 채널 사이의 불일치 문제를 극복할 수 있다.
시간 도메인에서의 신호 Mixing
여기서 설명하는 과정은, 참조 신호의 주파수에 인접한 신호 정보만을 추출하고 다른 모든 부분을 제거하는 동기화 감지(synchronous detection)의 매우 좋은 예제이다. 결과적으로 우리가 얻고자하는 신호 정보만을 효과적으로 필터링할 수 있는 방법이다.
- 복소수(Complex Number)는 복조에 활용할 수 있는 매우 효율적인 형태를 제공한다. 따라서 복소수를 활용해 아래 삼각법 규칙을 적용한다.
2. 입력신호(Vs(t))를 복소수 평면(Complex Plane)에서 두 벡터의 합으로 작성한다. 이때, 각 벡터는 R/sqrt(2)의 길이와 Ws(2ㅠfs)의 회전 속력을 갖는다. 한 부분은 시계 방향, 다른 부분은 반시계 방향으로 회전한다고 볼 수 있다. 상세히 보면, 두 벡터의 X축(실수 부분)의 합은 정확히 Vs(t)이고, Y축(허수 부분)의 합은 항상 0이다. 즉, 허수없이 실수로만 표현될 수 있는 부분만 남는다는 뜻이다.
3. Dual-Phase Down-Mixing은 입력 신호와 참조 신호의 복소수로 표현될 수 있다.

4. 복소수 평면에서 보면, 입력신호(Vs(t))는 회전하는 두 벡터의 합으로 볼 수 있다. 위 2번 과정에서 확인한 것처럼, X축(실수 부분)은 두 값의 합으로 표현되지만, Y축(허수 부분)의 합은 0이 된다.
입력 신호의 주파수와 참조 신호의 주파수에서 추출한 신호들의 부분의 합과 차를 활용해 Mixing후의 복소수 신호는 아래와 같이 표현할 수 있다.
5. 복조된 신호(Z(t))의 실수 및 허수 부분은 In-Phase 부분인 X(t)와 Quadrature 부분인 Y(t)로 분류된다. 이들은 오일러의 법칙(Euler’s Law) [exp(iWs*t) = cos(Ws*t) + isin(Ws*t)]을 통해 아래와 같이 표현될 수 있다.

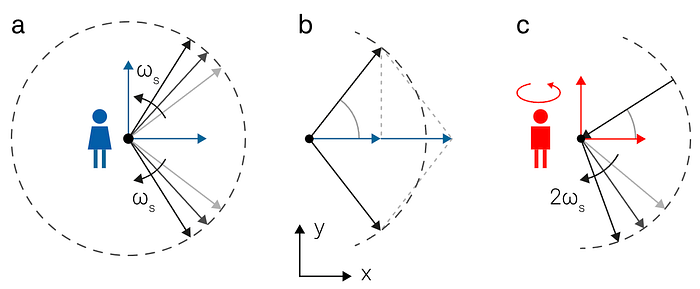
아래 ©에서 복소수 Mixing은 중심에 위치한 관측자가 반시계 방향으로 Wr의 속도로 회전하는 것과 같다. 관측자의 입장에서 두 벡터는 각각 Ws — Wr 과 Ws + Wr의 속력으로 회전한다. 이때 Ws + Wr의 속력으로 움직이는 벡터는 입력 신호와 참조 신호의 주파수가 가까울 수록 더 빨리 회전한다.
결과적으로 회전시 반시계 방향 벡터가 정적인 상태일 때, 시계 방향 벡터는 관측자의 회전 속도보다 2배 더 빠르게 회전한다. 주의할 것은 반시계 방향의 벡터가 참조하는 신호보다 앞에 있을 경우 Θ의 값이 0보다 크다는 것이다.
6. 순차적인 필터링은 수학적으로 시간에 따라 움직이는 벡터의 평균으로 표현될 수 있다(<…>). 필터링은 빠르게 움직이는 |Ws + Wr| 주파수의 벡터를 <exp[-i(Ws + Wr)t + iΘ]> = 0 으로 연산해 0으로 만들어 제거한다. 복조후 평균적인 신호는 아래와 같이 표현된다.

7. Ws = Wr인 신호에서는 아래와 같이 더 단순하게 표현될 수 있다.
바로 위 표현이 복조된 신호로써 Lock-in Amplifier의 주 출력값이 된다. 절대값 |Z| = R이 신호의 Root Mean Square (RMS) 진폭값이고, arg(Z) = Θ이 참조 신호의 위상대비 입력 신호의 위상이되는 것이다.
그래프에서 본다면 Ws = Wr의 의미는 반시계 방향으로 흐르는 벡터가 정지한 것처럼 보인다는 것이다. 이때 시계 방향으로 흐르는 다른 벡터는 2배의 주파수 속력으로 회전하며(2Ws), 이는 2W 컴포넌트로도 불린다. Low-Pass Filter는 주로 이 2W 부분을 0으로 완전히 상쇄(cancel out)시킨다.
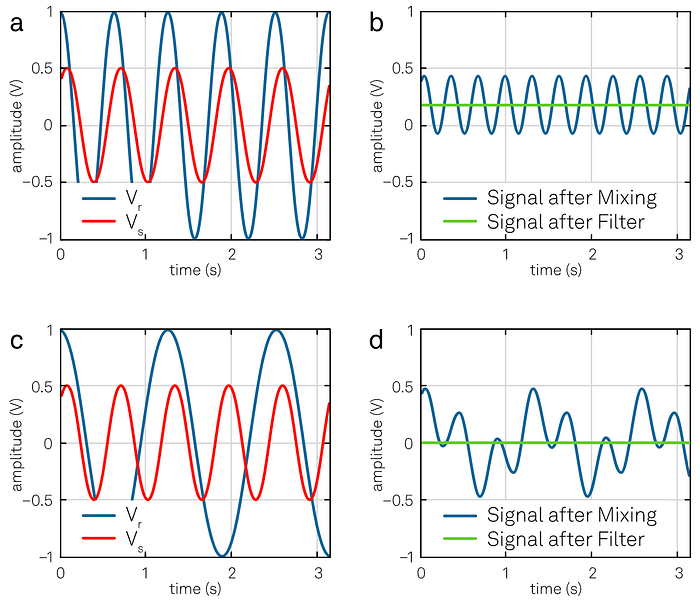
8. Oscilloscope에서 본다면 아래 그림에서 보이는 처럼 Mixing 및 필터링후 신호를 확인할 수 있다. 그림 (a)는 Sine 파형을 가지면서 주파수가 Ws = Wr로 똑같은, 입력 신호 Vs와 참조 신호 Vr를 보여준다. 그림 (b)는 Mixing 후 결과 신호를 보여주는데 2W 컴포넌트를 가지고 있다. 필터링 후 녹색 부분으로 표현된 신호는 오직 DC 부분만을 가지며, 이는 입력 신호 Vs의 In-Phase 부분 X(t)이다. (c)에서 표현되는 것처럼 입력 신호와 참조 신호가 다르면, Mixing 후 신호는 더 이상 일반적인 Sine 파형이 아니며 필터링 후 DC 부분이 완전히 0이 된다(d).
아래와 같이 진폭 0.5를 가진 빨간색으로 표현된 입력 신호 Vs는 파란색으로 표현된 참조 신호 Vr과 같은 주파수에서 곱해진다. 출력되는 신호는 DC Offset을 가지며 Vs와 Vr의 주파수보다 2배 더 큰 주파수를 가진다(b). 파란색으로 표현된 Mixing이후의 신호가 훨씬 더 파형의 밀도가 높은 것을 알 수 있다. 녹색으로 표현된 입력 신호의 In-Phase 부분(X(t))으로써, 필터링 후 평균 신호의 진폭은 0.17V 정도로 낮아진다.
이후 입력 신호 빨간색 Vs는 참조 신호 파란색 Vr과 다른 주파수에서 다시한번 더 곱해진다©. 파란색으로 표현된 Mixing 후 신호는 fs — fr 과 fs + fr의 주파수 부분을 가지며, 녹색으로 표현된 필터링 후 평균 신호는 항상 0의 진폭을 갖는다(d).
주파수 영역에서의 신호 Mixing
시간 영역에서 주파수 영역으로 변환하기 위해서는 포리에 변환(Fourier Transform)을 활용한다. 포리에 변환은 선형적(linear)이고 Sine 파형의 함수를 시간 영역내 f0의 주파수에서, 주파수 영역의 스펙트럼내 f0 주파수의 단수 피크인 Dirac delta 함수 δ(f-f0)로 변환시킨다. 그 어떤 주기적 신호라도 Sine 및 Cos 파형의 중첩(Superposition)으로 표현될 수 있는 것처럼, 변환 후 신호가 오직 몇 개의 스펙트럼 컴포넌트로만 이루어져 있다면 직관적으로 이해될 수 있다.
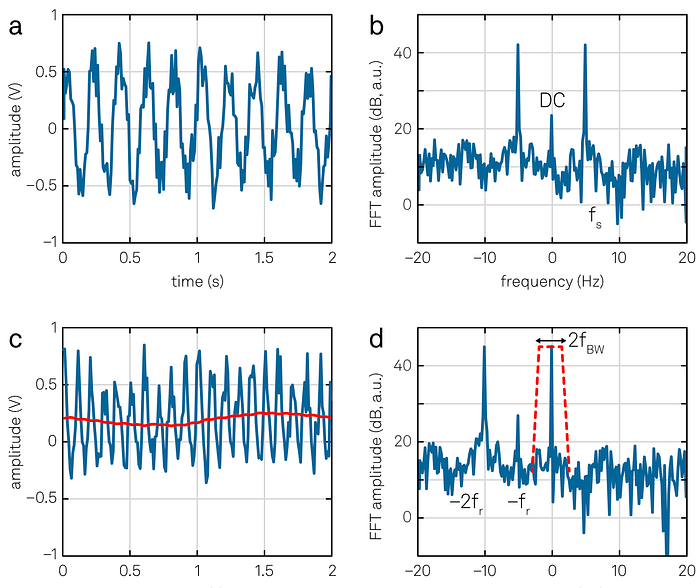
아래 그래프 중 (a)는 시간 영역에서 표현된 본래 Sine 파형을 보여주며, (b)는 주파수 영역으로 포리에 변환을 적용한 파형을 보여준다. 변환된 Sine 파형이 스펙트럼내 +fs 및 -fs 주파수에서 피크 진폭을 보여주는 것을 볼 수 있다. f = 0에 존재하는 상대적으로 조금 더 작은 피크는 입력 신호의 DC Offset으로 인해 발생한 것이다.
(c)에서의 파란 파형은 Mixing후 시간 영역에서의 신호를 보여준다. (d)에서 보여주는 연관 스펙트럼은 본질적으로 (b)에서 표현된 신호와 같으나, 참조 주파수 fr 만큼 왼쪽으로 shift된 (-2fr) 신호이다.
기본적으로 (a)는 시간 영역의 노이즈가 존재하는 환경에서의 본래 신호이다. ©는 이를 복조한 후의 파란색 Mixing 후 신호와, 빨간색 필터링(Low-pass filtering 적용)후 신호로써, LPF의 Bandwidth만큼의 주파수 영역내 신호 정보를 포함한다.
(b)는 주파수 영역에서의 신호이고, (d)는 복조 후 -2fr 만큼 shift된 후의 신호이다. (d)는 복조 후 주파수 mixing이 -fr 만큼의 주파수 컴포넌트를 shift하고, 필터링을 통해 Bandwidth 만큼의 주파수 범위를 f = 0를 기준으로 잡아 신호 정보를 추출한다. -fr의 신호는 입력 신호의 DC Offset과 1/f 만큼의 노이즈로인해 발생한 것이다. 노이즈를 제거해 보다 더 정확한 측정을 얻기 위해서는 적절한 필터링을 통해 해당 컴포넌트가 발생하지 않도록 눌러주는 것이 좋다.
Low-pass 필터링은 (d)에서 빨간 점선으로 표현되었으며 기준 주파수를 중심으로Bandwidth 만큼의 주파수 범위의 신호 정보를 추출한다. ©에서의 빨간색 신호는 필터링 후의 출력 신호로써, (d)에서 시각화된 스펙트럼의 DC 컴포넌트와 |f| < fBW내 발생한 노이즈의 합으로 볼 수 있다.
주목할 것은, 입력 신호의 주파수인 fs보다 필터의 BW가 상당히 작아야하는데, 이는 입력 신호의 DC Offset를 효과적으로 억제할 수 있기 때문이다. 따라서 실험하고자하는 목적에 맞게끔 적절한 성질을 가진 필터를 선택하는 것이 매우 중요하다.
주파수 영역에서의 Low-pass 필터링
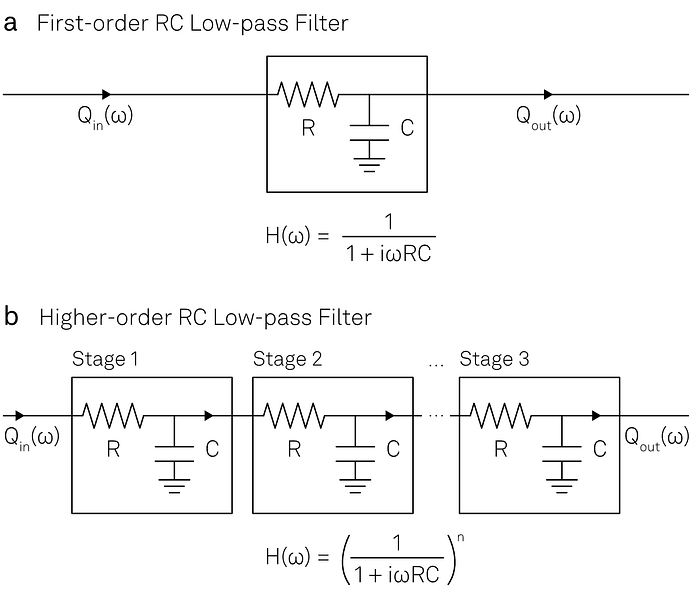
Low-pass 필터링을 주파수 영역에서 적용하려면, 먼저 대부분의 필터에서 적용되는 입력 신호 Qin(W)와 필터링된 신호 Qout(W)의 관계를 알 필요가 있다.
여기서 H(W)는 필터의 전달 함수(transfer function)이라 부른다. Qin(W)과 Qout(W)는 시간 영역에 있는 입력 신호 Qin(t)와 출력 신호 Qout(t)에 각각 포리에 변환을 적용한 결과이다.
아래 (a)그림은 전달함수가 포함된 일차 RC Low-pass 필터이고, (b)는 이러한 일차 Low-Pass Filter를 두 개 이상 쌓은 다차 RC Low-pass 필터이다. 최종 전달함수는 각 필터의 전달함수를 곱한 결과가 된다.
일반적으로 스펙트럼 내에서 원하지 않는 부분을 완전히 제거하기 위한 이상적인 방법으로 필터가 fBW 보다 낮은 주파수대에서 모든 주파수의 신호 정보를 전달해야한다고 생각할 수 있다. 즉, passband 내에서만 모든 주파수대의 신호 정보를 전달하고 다른 영역에서의 정보는 받지 않는 stopband를 활성화하는 방식을 생각할 수 있다.
그러나, 이렇게 “벽돌 필터(Brick-Wall Filter)”라 일컫는 이상적인 필터는 현실에서 존재하지 않으며 실현하기 매우 어렵다. 그 이유는 필터의 Impulse 응답이 거의 무한의 시간 영역으로 확장되기 때문이다.
그래서 일반적으로 이러한 현상을 근사한 상태에서 실험을 진행한다. 이에 해당 요소를 고려한, 아래와 같이 아날로그 및 디지털 영역에서 구현이 용이한 RC 필터 모델을 활용한다.
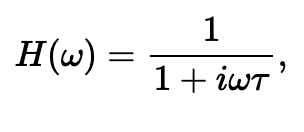
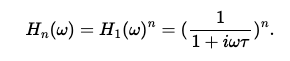
아날로그 RC 필터에서 활용되는 전달함수는 아래와 같이 표현될 수 있다. 아래 함수에서 τ = RC는 필터 시간 상수(time constant)라하며 저항인 R과 Capacitord의 전기 용량인 Capacitance인 C로 표현된다.
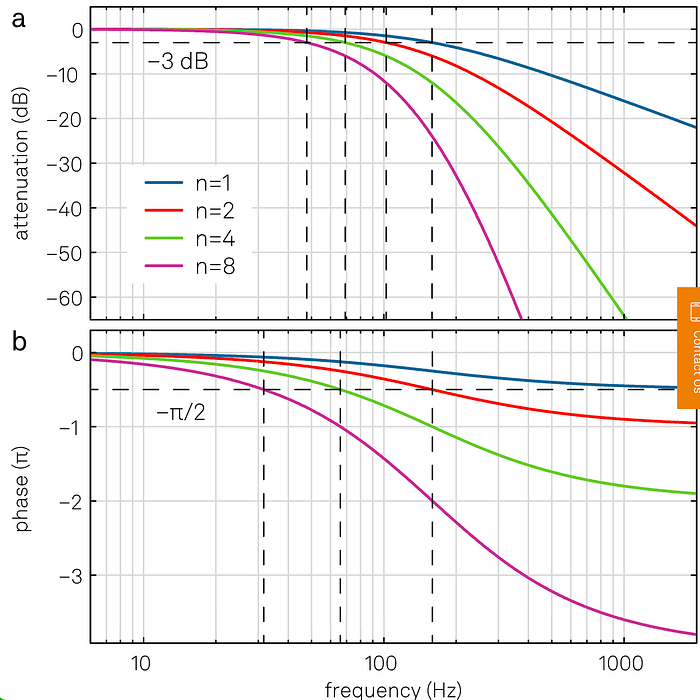
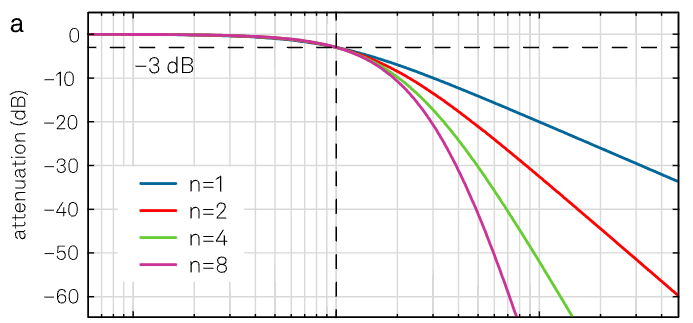
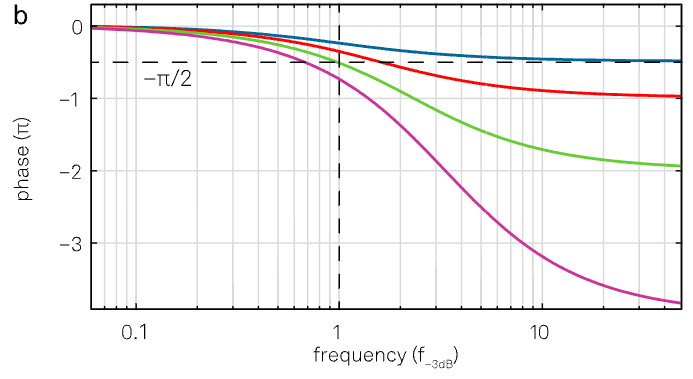
아래 그림에서 (a)와 (b)의 파란색 그래프는 Bode Plot으로 표현된 전달 함수를 보여준다. 각각 log(f) 형태의 함수로써, 20log|H(2ㅠf)|와 arg|H(2ㅠf)|로 표현된다. 다차 필터(n = 2, 4 ,8)인 전달 함수가 같은 시간 상수(τ = RC)를 갖는 경우는 f-3DB의 상당히 낮은 신호 Bandwidth를 갖는 것을 알 수 있다.
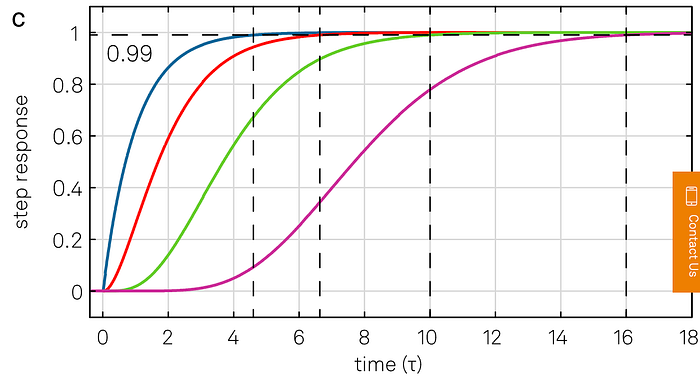
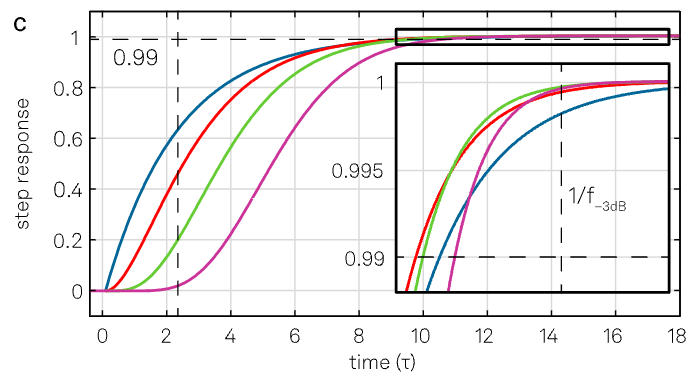
©는 해당 전달 함수들의 시간 영역에서의 Step Response를 보여준다. 위 그림 15의 (b)와 같이 다차 RC 필터를 사용하여 여러개의 필터를 Cascading하는 방식은, 비슷한 레벨의 정확도에 도달하는데 상당한 안정화 시간(settling time)의 증가를 불러온다. 이는 아래 (b)에서 보여주는 것처럼 더 큰 위상 지연(phase delay)를 초래하기 때문이다. 다차 RC 필터 혹은 통합 필터(Integrator Filter)의 또 하나의 장점 중 하나는 시간 영역에서 Overshoot이 없다는 것인데, 이는 Butterworth 필터의 단점이기도 하다.
아래는 위와 같은 Bode Plot이지만, 모든 필터가 같은 Cut-off 지점인 f-3dB를 가지면서 이번에는 시간 상수를 변화(τ = 0.16, 0.10, 0.069, 0.048)시켜본 그래프다. (a)는 다차 RC 필터를 보여주는데, 더 높은 주파수대에서 더 빠르게 슬로프가 변화하는 것을 볼 수 있다. 따라서 아래 (b)역시 다차 필터가 더 큰 위상 지연을 갖는다는 것을 보여주는데, 이는 사실 피드백 어플리케이션에 있어 부정적인 영향을 줄 수 있다.
©는 시간 영역에서 일차 필터의 시간 상수 τ1에 따른 Step Response를 보여준다. 초기에는 더 낮은 차원의 필터의 응답이 입력 신호의 변화에 대해 더 빠르게 응답하지만, 시간이 지날수록 이 장점이 상실되고 특정 시점에서는 더 높은 차원의 필터가 낮은 차원의 필터를 추월한다.
아래 그림 22는 같은 시간 상수를 가정할 때 N차원의 RC 필터의 속성의 변화를 보여주는 테이블이다. 일반적으로 동적인 어플리케이션은 f-3dB 및 안정화 시간(settling time)을 고려하는 반면, 노이즈 측정에 있어서는 올바른 fNEP 주파수가 매우 중요하다. 아래 테이블에서 나타난 N차원의 증가에따른 필터 성질의 변화 관계를 고려하여, 다른 차원의 필터라도 같은 Bandwidth를 가지는 필터에 대해서 쉽게 필터 시간 상수를 계산할 수 있다.

그림 17 (a)의 파란색 그래프에서 볼 수 있듯이 Bode Plot의 감쇠(Attenuation)는 f-3dB 이상의 주파수에서 주파수가 10배 증가함에 따라 10배 씩 증가한다는 것을 알 수 있다. 이는 6dB/octave (20 dB/decade) 정도이며, 주파수가 2배씩 증가할수록 진폭이 2분의 1씩 감소하는 것과 같다. f-3dB의 Cut-off 주파수는 신호의 세기가 -3dB(2분의 1) 만큼 줄어드는 시점의 주파수를 말한다. 진폭은 신호 세기(power)의 루트와 비례하며, f-3dB 주파수에서 1/sqrt(2) = 0.707만큼 감소한다.
그림 16의 공식으로 표현된 필터는 Cut-off 주파수가 f-3dB = 1/(2ㅠτ)이다. 그림 17의 (b) 그래프에서 LPF는 arg[H(w)]에 주파수 의존적 위상 지연(frequency dependent phase delay)을 만들어 낸다.
이상적인 벽톨 필터와 비교해서, 일차 필터는 분명 덜 효율적이다. 효율성을 높이기 위해서는 여러 일차 필터를 Cascading하는 것이 보통이다. 다차원 필터의 각각의 필터는 하나가 추가될 수록 차원이 1씩 증가한다. 구조적으로 한 필터의 출력이 다른 필터의 입력 부분이 되므로, 각각의 전달 함수를 곱하면 되는 것이다. N차원의 다차원 필터의 전달 함수는 다음과 같이 표현될 수 있다.
N차원 함수의 감쇠(attenuation)는 일차 필터의 감쇠에 N을 곱한 것과 같고, 기울기는 n x 20 dB/dec 이 된다. 그림 17의 (a)와 (b)에서 표현된 n = 1, 2, 4, 8 차원의 필터 성질을 보면, 필터의 차원이 높을수록, 진폭 전달함수가 이상적인 “벽돌 필터"의 성질에 더욱 가까워진다. 이와 동시에 차원이 높아질수록 위상 지연도 증가한다. 만약 예를 들어 PLL(Phased-Locked Loops) 처럼, 위상이 피드백을 적용하는 시스템을 가진 어플리케이션에 활용된다면, 추가적인 위상 지연은 제어 루프의 Bandwidth 및 안정성을 제한할 수 있다.
그림 18의 (a)와 (b)는 여러 다른 차원을 가진 필터들이 f-3dB의 같은 Bandwidth를 갖는 상황에서 시간 상수만 변화시킨 것을 보여준다. 그림 22의 테이블을 통해 차원의 변화에 따른 필터 성질에 대한 수학적 관계를 파악할 수 있다.
노이즈 측정에 있어서는 f-3dB Bandwidth 보다는 노이즈 등가 세기(Noise Equivalent Power, NEP) Bandwidth인 fNEP에 대해 필터를 정의하는 것이 바람직하다. 노이즈 등가 세기 Bandwidth(fNEP)는 이상적인 벽돌 필터의 Cut-off 주파수로써, 우리가 정의하고자하는 이상적 필터와 같은 양의 백색 노이즈(white noise)를 방출한다. Cascaded된 다차원 필터에 대해서는 그림 22의 테이블을 참조하여 fNEP를 f-3dB로 변환할 수 있다.
입력 신호인 Vs(t)를 참조 신호인 sqrt(2)exp(-iWt*t)와 Mixing하면, 입력 신호 스펙트럼은 복조 주파수 Wr에 의해 Shift되며, Vs(W-Wr)이 된다. LPF는 스펙트럼을 필터 전달 함수인 Hn(W)와 곱하기를 통해 변환시킨다. 아래 필터 응답 표현식은 복조된 신호인 Z(t)가 참조 주파수 주변에 있는 모든 주파수 컴포넌트를 포함한다는 것을 보여준다.
이 표현식은 복조가 fr이라는 주파수를 중심으로 주파수 스펙트럼을 골라내고, 하단과 상단 경계를 f-3dB 만큼 확장하는 Bandpass 필터와 같은 성질을 같는다는 것을 보여준다. 또한 입력 신호의 스펙트럼을 복조주파수 fr을 중심으로 포리에 변환된 복조 신호를 필터의 전달 함수로 나누는 방식으로 복구할 수 있다는 것을 보여준다. 이러한 형태의 스펙트럼 분석은 FFT 스펙트럼 분석기에서 자주 활용되며, zoomFFT라 불리기도 한다.
시간 영역에서의 Low-pass 필터링
시간 영역에서의 필터 성질은 아마도 그림 17과 18의 © 그래프를 통해 볼 수 있는 Step Response에 의해 가장 잘 표현될 수 있다. 이러한 Plot들은 필터의 입력값이 0에서 1로 변화하면서 Step과 같은 사각 변화를 보일 때를 표현한다. 이 경우, 필터 출력이 새로운 값으로 안정화(settle)되기전 특정한 양의 시간이 필요하다. 필터를 지나는 신호를 정확하게 측정하기 위해서는, 실험자들이 측정 전 충분히 긴 안정화 시간(settling time)이 지날 때까지 기다려야한다.
그림 22의 테이블은 각 차원 필터의 최종값의 63.2%, 90%, 99%, 99.9%가 되기까지 걸리는 시간을 나열한 것이며 시간 상수는 τ로 고정되어 있다. 예를 들어 주파수가 1MHz인 신호를 가지고 있고, 1 kHz의 Bandwidth를 갖는 4차원 필터가 주어졌다고 가정하자. 이 정보를 바탕으로 테이블에서 주어진 숫자에 기반하여 시간 상수는 69us이고 1% 에러(99%)에 대한 안정화 시간은 0.7ms인 것을 계산할 수 있다.
참조:
(1) https://encrypted-tbn0.gstatic.com/images?q=tbn:ANd9GcQaRV1dXHGi2gqEA9iEE6qlu1RKxE5Ym3brqkzs60fIBg&s
(2) https://www.analogictips.com/wp-content/uploads/2021/05/WTWH_Lock-In-Amplifier_Pt2_Fig1.png
(4) https://www.zhinst.com/others/en/resources/principles-of-lock-in-detection
